")


Bayer-Farbinterpolation
Die Interpolation der fehlenden Farbwerte aus den umgebenden Pixelwerten kann auf vielfältige Weise geschehen, die unterschiedlich rechenzeit-intensiv ist, aber große Auswirkungen auf das resultierende Farbbild haben. So können 2x2, 3x3-Kernels oder komplexe mehrstufige Softwareberechnungen eingesetzt werden, um Artefakte zu unterdrücken. Besonders schwierig ist typischerweise der Interpolationsvorgang senkrecht zu den Kanten von Farbbereichen. Je nach Algorithmus (nearest neighbor, linear, kubisch...) kommt es zu Kamm-artig ausgefranzten oder glatteren Kanten.
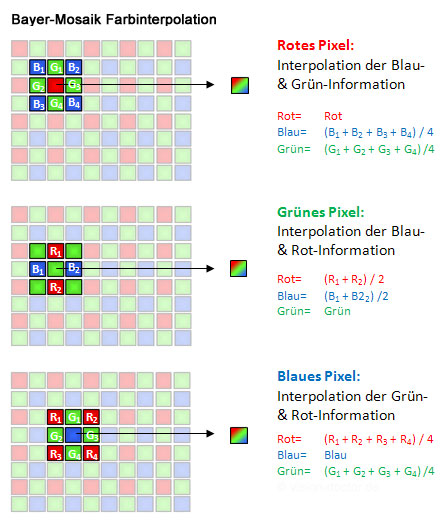
Beispiel einer 3x3-Interpolation:
Bei einem 3x3-Pixelblock ist das zentrale Pixel von jeweils 8 Nachbarn umgeben. Dabei sind vier der Pixel direkt senkrecht und waagrecht angeordnet, vier weitere diagonal. Aus diesen Pixeln wird nun für das zentrale Pixel die fehlende Farbinformation für die zwei anderen Farbkanäle durch Mittelwertsbildung aus den Nachbarn errechnet.
|
Die Errechnung der Grünkomponente für ein blaues oder rotes Pixel ist beim 3x3-Kernel meist noch etwas differenzierter. Oftmals ist ja eine Farbfläche nicht homogen, sondern es verlaufen Objektkanten oder Farbgrenzen durch das Bild. Durch die hohe Anzahl von grünen Nachbarn käme es in diesen Bildzonen zu schlechten Ergebnissen. Dazu werden die weiteren äußeren Nachbarn der vier grünen Pixel betrachtet: Im Falle des blauen Pixels sind dies wieder vier blaue Pixel, zwei sind horizontal, zwei sind vertikal angeordnet. Je nach deren Helligkeit kann dann der Grünwert nur aus (G1+G3)/2 oder (G2+G4)/2 berechnet werden. Bei einer waagrechten Änderung der blauen Farbwerte wird das horizontale Grünpaar (G1+G3)/2 genommen und umgekehrt. Die Grüninterpolation für ein rotes Pixel verläuft dementsprechend.