")


Verarbeitungsfunktionen
USB-, Firewire- und GigE-Kameras (sowie selbstverständlich auch intelligente Kameras) benötigen zur Bildübertragung keine spezielle Bilderfassungskarte mehr. Diese Interface-Karten werden typischerweise nicht zur Bildübertragung, sondern auch zur Onboard-Vorverarbeitung der Bilddaten genutzt. Folgerichtig sind diese klassischen Frame Grabber-Zusatzfunktionalitäten in diese Kameratypen hinein gewandert, die keinen Frame Grabber mehr benötigen.
So können die Rohbilder vor der Weitergabe zum Rechnersystem optimiert werden, ohne dass dies die Prozessorlast des BV-Systems erhöht. Lookup tables mappen die Helligkeits-Intensitäten neu, Lichtverlaufskorrekturen können Bilder global homogenisieren, ein automatischer Weißabgleich kompensiert die Farbtemperatur der Kamera, sogar Defektpixel können aus dem Bild heraus interpoliert werden.
Einige wichtige Funktionalitäten werden im Folgenden erklärt.
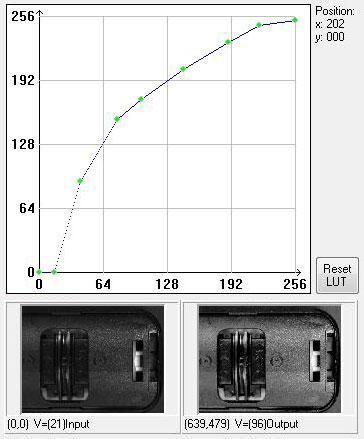
Lookup tables (LUT)
Mit Hilfe von LUTs können die Helligkeitsinformationen jedes einzelnen Pixels in einen neuen Wert übersetzt werden. Dazu kann eine Tabelle angelegt und beschrieben werden, die festlegt, welcher Grauton (von 0 bis 255 bei einer 8Bit-Monochromkamera) welchen Zielwert erhält.
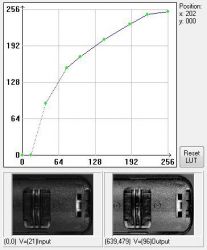
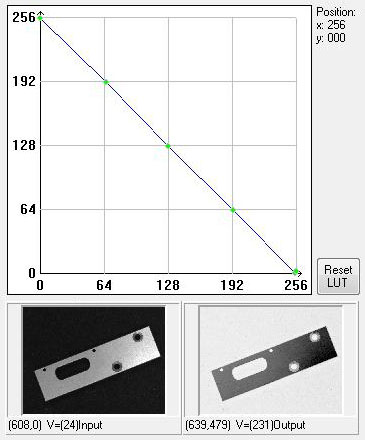
Bild mit LUT-Korrektur

Bild mit LUT-Korrektur
Auf diese Art und Weise kann zum Beispiel eine Gammakurven-Korrektur oder beliebige Änderung der Grautonverteilung erfolgen. Dunkle oder helle Bildbereiche können etwa stärker aufgespreizt oder Bilder invertiert werden.
Shading-Korrektur
In vielen Fällen ist im Kamerabild ein stetiger Helligkeitsabfall des Lichts zum Rand hin zu beobachten.
Typische Ursachen hierfür sind:
- Vignettierungs-Effekte der Kamera-Optik
- Zu klein gewählte oder konstruktiv bedingt inhomogene Beleuchtungen, die nicht das gesamte Bild gleichmäßig ausleuchten.
- Shading-Effekte durch Mikrolinsen auf CCD-Sensoren, die im Vergleich zum Objektivanschluss der Kamera (C-Mount / F-Mount etc.) sehr groß sind. Mikrolinsen auf den Pixeln am Sensorrand verursachen durch schrägen Lichteinfall ebenfalls Vignettierung. Eine starke Bildabschattung ist die Folge.
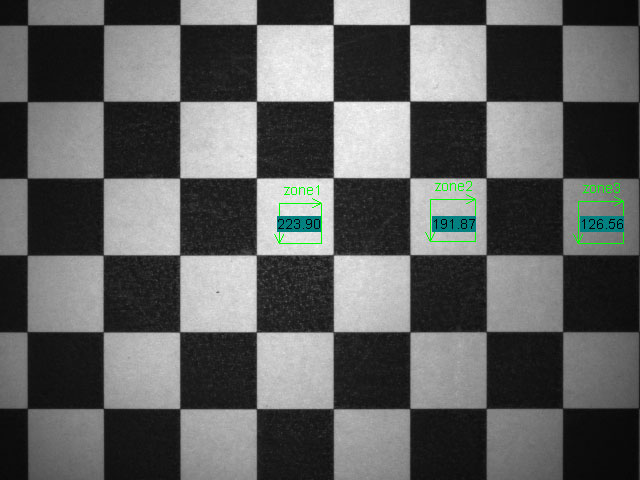
Original-Aufnahme mit Lichtverlauf
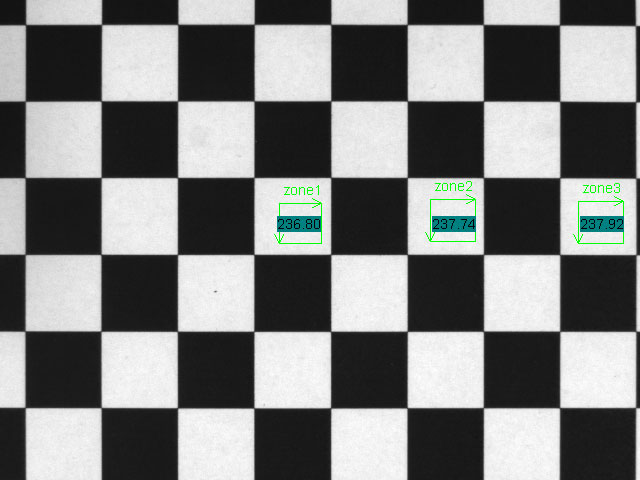
Bild mit Shading-Korrektur
Eine Shading-Korrektur kann diesen Lichtverlauf kompensieren. Moderne Kameras können dies direkt erledigen. Man spricht bei dieser Funktionalität auch von Hellbild-Kalibration, Lichtverlaufskorrektur, Field of view balance etc.
Pixel-Fehlerkorrektur
Auch bei modernen CCDs, aber speziell bei CMOS-Sensoren können einzelne defekte Pixel auftreten, oder bei gleicher Belichtung heller oder dunkler als benachbarte Pixel leuchten. Die defekten Pixel, die dabei am meisten störend wirken sind Pixel, die sich durch ungenügende oder defekte Isolation auf dem Halbleiter zusätzlich aufladen und die eigentliche Bildinformation durch zu viele freie Ladungsträger vernichten. Diese Pixelfehler erscheinen im Bild als sehr helle Punkte. Liegen mehrere derartige Pixelfehler vor, so sieht das Bild wie ein "Sternenhimmel" aus. Bei 1CCD-Farbkameras können aufgrund des Bayer-Mosaiks diese hellen Punkte nach der Signalverarbeitung sogar farbig erscheinen.
Pixel mit extrem geringen oder hohen Output-Eigenschaften können mittels geeigneter Kalibration durch Interpolation mit angrenzenden Pixeln eliminiert werden. Dies wird von den Herstellern oftmals schon ab Werk gemacht. Allerdings treten diese Effekte oftmals erst nach einer gewissen Alterung des Sensors oder bei speziellen Umweltbedingungen auf. Bei hochwertigen Kameras kann der Anwender jederzeit eigene Abgleiche vornehmen, um diese Störpixel zu kompensieren.
BayerToRGB-Konvertierung
Moderne industrielle Farbkameras können Ihre Daten in verschiedenen Farbformaten übertragen. Das tatsächlich auf einer Einchip-Farbkamera erzeugte Farbbild ist jedoch in Wirklichkeit ein Graustufenbild mit Bayer-Mosaik. In einer typischen Pixelanordnung auf dem Sensor wird durch Farbfilter auf den einzelnen Pixeln nur rotes, grünes oder blaues Licht durchgelassen. Dies führt zu einem gerasterten Grautonbild. Die Helligkeit der Grautöne entspricht der jeweiligen Intensität der Farbe. Unter der Berücksichtigung der jeweiligen Pixel-Nachbarn können die fehlenden R/G/B-Werte gewonnen und für alle Pixel errechnet werden. Viele Farbkameras können direkt eine Farbumrechnung (BayerToRGB-Konvertierung) mit Hilfe eines FPGAs vornehmen.
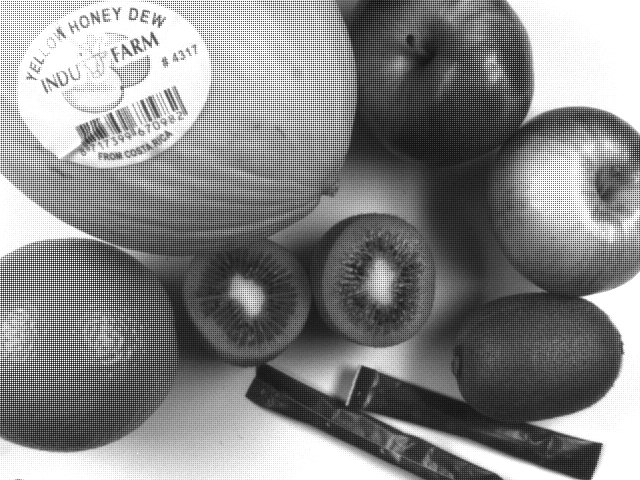
Roh-Bayerbild ohne Farbkonvertierung

{kind=link}
{kind=link}
Erzeugtes Farbbild
Das Bild kann oftmals statt digitales 24Bit-RGB-Farbbild auch als Roh-Bayer-8Bit-Graustufenbild übertragen werden. Die Farbumrechnung muss dann allerdings auf einem Frame Grabber oder mit Hilfe einer PC-Software erfolgen. Vorteil der nachträglichen Umrechnung ist die höhere Framerate, die übertragen werden kann, da nur 8 Bit Mono- und nicht 24Bit Farbinformationen transportiert werden müssen. Erfolgt die Umrechnung bereits in der Kamera, wird kein Frame Grabber oder CPU-Last des Rechners beansprucht.