")


Image circle diameter
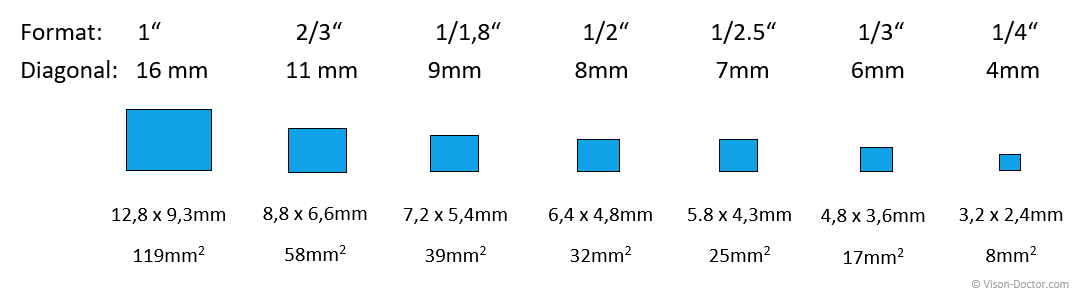
Even with the same lens connection like Nikon bayonet or C-mount, lenses can have different image circle diameters. This refers to the sensor surface which can be exposed by the optics in a uniform way without significant shadings on the margin.
Like the specification of the sensor size, the image circle of the optics, too, is usually given in inches (tube camera equivalent). 1/2" C-mount optics, for instance, can expose a sensor size of 1/3". It covers the sensor completely. If this optics would be used with a 1/2" sensor, the outer picture margins would be shaded, the image is "vignetted".
The dimensions of the optics must be greater or equal to those of the sensor!
What happens when a 2/3" or 1" optics with the same focal length is connected to a 1/3" or 1/2" sensor? Basically hardly anything: working distances, focal lengths, etc. do not vary in the first place. Only the picture angle of the optics changes.
Calculation of the image circle diameter
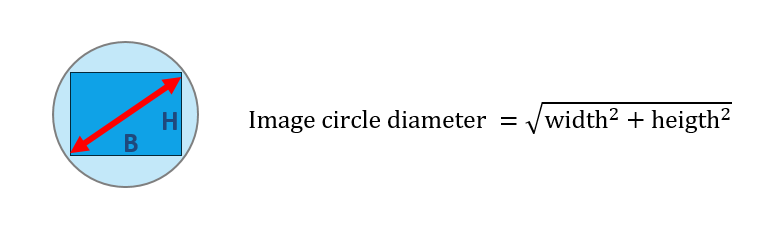
In case of an area scanning sensor, the required image circle is eventually the sensor diagonal:
 |
It can be calculated very easily using the Pythagorean formula (right-angled triangle):
 |
In case of a line scan camera, nothing has to be calculated: the required image circle diameter corresponds to the length of the sensor.
Important for imaging
- In general it is advisable to use a larger image circle, as the optical errors tend to increase significantly from the centre of the image to the image margin. If the optics is able to cover a larger image circle, resolution and image sharpness, above all, can be higher in the marginal areas.
- The intentional reduction of the optical path is achieved by means of the aperture of the lens. Stopping down also leads to an image enhancement, as rays of light close to the margin are avoided by means of the lenses, too.
