")


Belichtungszeit für Flächenkamera berechnen- bei linearem Vorschub oder Drehbewegungen
Die Berechung der korrekten Belichtungszeit bei bewegten Bauteilen verhindert unscharfe Bilder. Diese entstehen, wenn während der Belichtung im Bildbereich der Kamera sich die Pixel verschieben. Je nach Anwendungsfall sind unterschiedliche Toleranzen möglich. Ein Smear-Effekt von 1 Pixel ist meistens mit dem Auge nicht mehr sichtbar, beeinflusst aber bereits negativ Präzisions-Messergebnisse. Für viele Standardanwendungen ist dieser Wert jedoch akzeptabel. Sinnvolle Belichtungszeiten für CCD-Kameras liegen etwa zwischen 50 µs bis maximal 500 ms. Typische Werte in der Praxis für "Normal-Anwendungen" sind meist zwischen 0,1 bis 20 ms. Mit CMOS-Sensorsen lassen sich auch kürzeste Belichtungszeiten von bis zu 1µs realisieren.
Sollte die Belichtungszeit größere Werte ergeben (z.B. 50ms), darf natürlich jederzeit kürzer belichtet werden (z.B. 5ms), falls genügend Licht vorhanden ist. Längere Belichtungszeiten sind ebenfalls zu vermeiden, da auch Vibrationen ebenfalls im Bild sichtbar werden könnten.
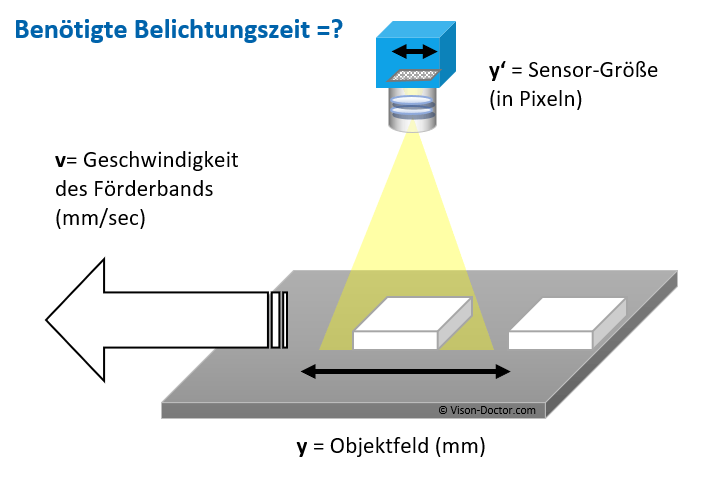
Berechnung der Belichtungszeit für Flächenkameras bei der Inspektion mit linearem Vorschub (Förderband)
Verwenden Sie diese Berechnungsmethode, wenn sich das inspizierte Objekt linear durch den Sichtbereich der Kamera bewegt.
Hinweis: Auch bei Dropdown-Listen können eigene Werte eingegeben werden. Bitte ersten Listeneintrag "Userdef." wählen!
Wir achten Ihre Privatsphäre: Wir speichern keinerlei Eingaben, Ergebnisse oder Empfänger. Schicken Sie sich Ihre Berechnung mit Ihrem eigenen Email-Programm (MailTo-Link).
Berechnung der Belichtungszeit für die Inspektion bei Drehbewegungen mit Flächenkameras
Die Berechung der korrekten Belichtungszeit ist auch bei Drehbewegungen möglich, bei denen zylindrische Objekte vor einer Flächenkamera inspiziert werden. Ein mögliches Beispiel wäre das Lesen eines Datamatrix-Codes auf einem runden Bauteil, das vor der Kamera gedreht wird, bis der Code vom BV-System eingelesen wurde.
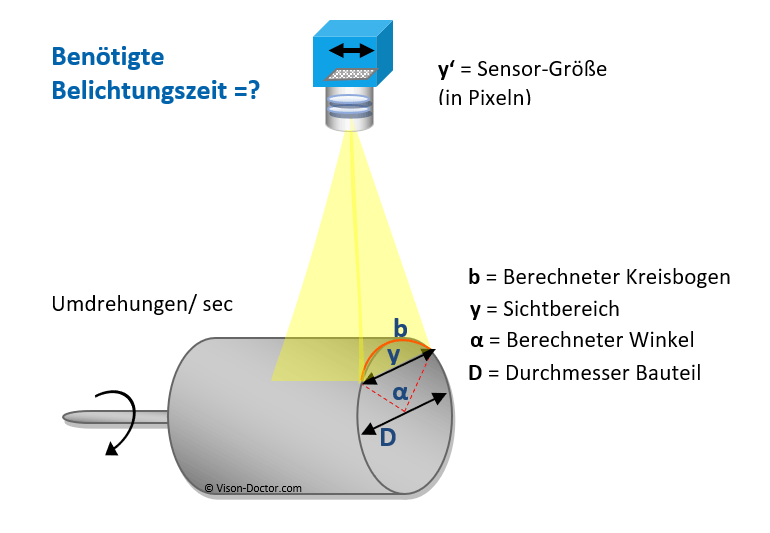
Beachten Sie, dass bei größeren Winkeln des Kreisbogens perspektivische Verkürzungen am Kreisbogenrand auftreten, die in der Berechnung nicht berücksichtigt werden. Ebenso werden Änderungen des Abbildungsmaßstabs durch unterschiedliche Arbeitsabstände vernachlässigt.
Hinweis: Auch bei Dropdown-Listen können eigene Werte eingegeben werden. Bitte ersten Listeneintrag "Userdef." wählen!
